Elektrický motor, zkráceně elektromotor, je elektrický stroj, s jehož pomocí se elektrická energie přeměňuje na mechanickou energii k pohonu různých mechanismů. Elektromotor je hlavním prvkem elektrického pohonu.
V některých provozních režimech elektrického pohonu elektromotor provádí zpětnou přeměnu energie, to znamená, že pracuje v elektrický generátor.
Podle typu vytvářeného mechanického pohybu mohou být elektromotory rotační, lineární atd. Elektromotorem se nejčastěji rozumí rotační elektromotor, protože se mu dostalo největšího uplatnění.
Oblast vědy a techniky, která studuje elektrické stroje, je elektromechanika. Všeobecně se má za to, že jeho historie začíná v roce 1821, kdy byl vytvořen první elektromotor M. Faradaye.
- Konstrukce elektromotoru
- Princip činnosti elektromotoru
- Klasifikace elektromotorů
- Typy elektromotorů
- Komutátorové motory
- Univerzální elektromotor
- Stejnosměrný kartáčovaný motor
- Bezkomutátorové motory
- Asynchronní motor
- Synchronní elektromotor
- Speciální elektromotory
- Servomotor
- Základní parametry elektromotoru
- Točivý moment motoru
- Výkon elektromotoru
- Mechanická síla
- Účinnost elektromotoru
- Frekvence otáčení
- Moment setrvačnosti rotoru
- Jmenovité napětí
- Elektrická časová konstanta
- Mechanické vlastnosti
- Porovnání charakteristik externě komutovaných elektromotorů
- Princip činnosti elektromotoru
- DC motory
- Dále
Konstrukce elektromotoru
Hlavní součásti rotačního elektromotoru jsou stator a rotor. Stator – stacionární část, rotor – otočná část.
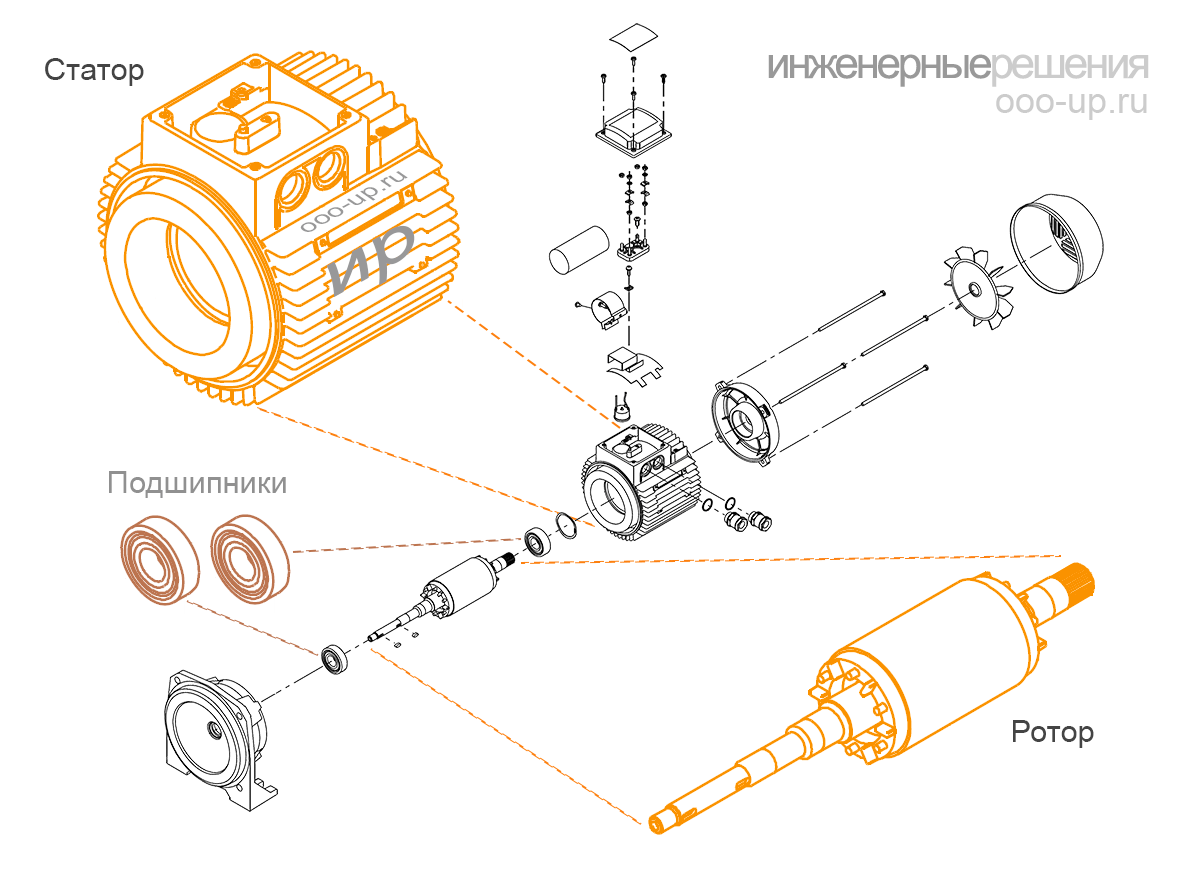
Standardní provedení rotačního motoru
U většiny elektromotorů je rotor umístěn uvnitř statoru. Elektromotory, ve kterých je rotor umístěn mimo stator, se nazývají elektromotory invertního typu.
Princip činnosti elektromotoru
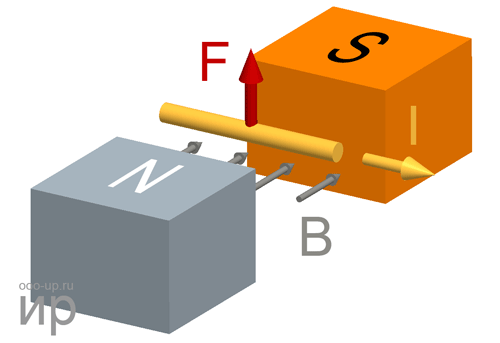
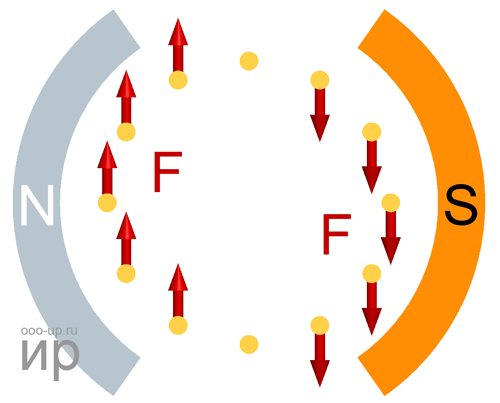
1. Podle Ampérova zákona bude vodič s proudem I v magnetickém poli ovlivněn o vynutit F.
2. Pokud je vodič s proudem I ohnut do rámu a umístěn do magnetického pole, pak na dvě strany rámu, umístěné v pravém úhlu k magnetickému poli, budou působit opačně směřující síly F
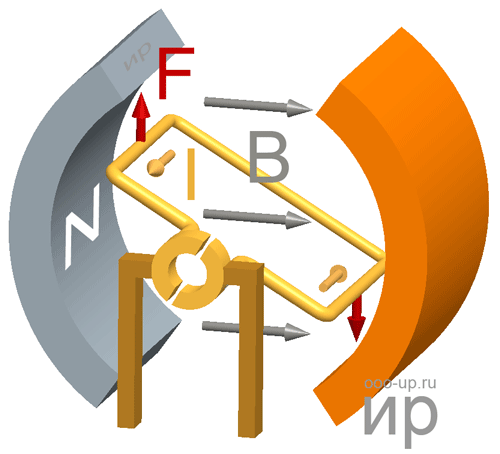
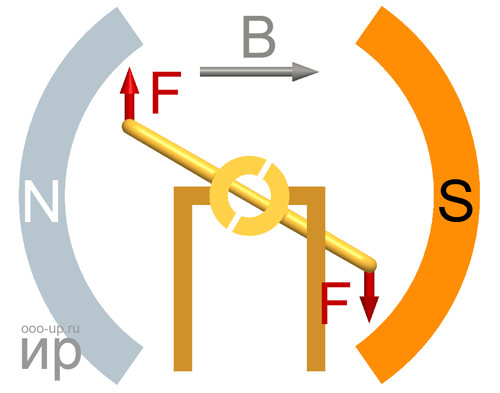
3. Síly působící na rám vytvářejí krouticí moment nebo moment síly, který jej otáčí.
4. Vyrobené elektromotory mají vícenásobné otáčky na kotvě pro zajištění většího konstantního točivého momentu.
5. Magnetické pole mohou vytvářet jak magnety, tak elektromagnety. Elektromagnet se obvykle skládá z drátu navinutého kolem jádra. Podle zákona elektromagnetické indukce tedy proud tekoucí do rámů indukuje proud do vinutí elektromagnetu, který zase vytvoří magnetické pole.
- Podrobný popis principu činnosti elektromotorů různých typů:
Klasifikace elektromotorů
- Univerzální
- Odpor
- DCDC s budicím vinutím
- Zapínání vinutí
- BDPT
(Brushless motor + EP | + DPR) - WFD
(Proudový motor s rotorem s vyčnívajícími póly a soustředěným statorovým vinutím + ED |+ DPR)
- Třífázový
(vícefázové)- ADKR
- ADFR
- se startovacím vinutím
- se stíněnými sloupy
- s asymetrickým magnetickým jádrem
- SDOV
(se sběracími kroužky a kartáči) —> - SDPM 5 —>
- SDPMW
- SDPMP
- Hybridní
- Tato kategorie nepředstavuje samostatnou třídu elektromotorů, protože zařízení zařazená do uvažované kategorie (BDDC, VRM) jsou kombinací bezkomutátorového motoru, elektrického měniče (invertoru) a v některých případech i snímače polohy rotoru. . U těchto zařízení je elektrický měnič pro svou malou složitost a malé rozměry obvykle integrován do elektromotoru.
- Ventilový motor lze definovat jako elektromotor, který má snímač polohy rotoru, který řídí polovodičový měnič, který provádí koordinovanou komutaci vinutí kotvy [5].
- Stejnosměrný ventilový motor je stejnosměrný elektromotor, jehož spínacím zařízením ventilu je invertor řízený buď polohou rotoru, nebo fází napětí na vinutí kotvy, nebo polohou magnetického pole [1].
- Elektromotory používané v BLDC a VRD jsou střídavé motory a díky přítomnosti elektrického měniče v těchto zařízeních jsou připojeny ke stejnosměrné síti.
- Krokový motor není samostatnou třídou motorů. Konstrukčně se jedná o PMSM, SRD nebo hybridní SRD-PM.
- CMDC – komutátorový stejnosměrný motor
- BLDC – bezkomutátorový DC motor
- EP – elektrický měnič
- DPR – snímač polohy rotoru
- VRD – spínaný reluktanční motor
- ADKR – asynchronní motor s rotorem nakrátko
- ADFR – asynchronní motor s vinutým rotorem
- SDOV – synchronní motor s budícím vinutím
- PMSM – synchronní motor s permanentními magnety
- SPMSM – synchronní motor s povrchovými permanentními magnety
- PMSD – synchronní motor s vestavěnými permanentními magnety
- SRD – synchronní reluktanční motor
- PM – permanentní magnety
- CP – frekvenční měnič
Typy elektromotorů
Komutátorové motory
Komutátorový stroj je točivý elektrický stroj, ve kterém je alespoň jedno z vinutí zapojených do procesu hlavní přeměny energie připojeno ke kolektoru [1]. V komutátorovém motoru slouží sestava kartáč-komutátor jako snímač polohy rotoru a proudový spínač ve vinutí.

Univerzální elektromotor
Může pracovat na střídavý a stejnosměrný proud. Široce se používá v ručním elektrickém nářadí a některých domácích spotřebičích (vysavače, pračky atd.). V USA a Evropě se používal jako trakční elektromotor. Rozšířil se díky svým malým rozměrům, relativně nízké ceně a snadnému ovládání.
Stejnosměrný kartáčovaný motor
Elektrický stroj, který přeměňuje stejnosměrnou elektrickou energii na mechanickou energii. Výhody stejnosměrného elektromotoru jsou: vysoký rozběhový moment, otáčky, možnost plynule řídit rychlost otáčení, jednoduchost konstrukce a ovládání. Nevýhodou motoru je nutnost údržby jednotek komutátor-kartáč a omezená životnost vlivem opotřebení komutátoru.
Bezkomutátorové motory
Bezkomutátorové motory mohou mít sběrací kroužky s kartáči, takže není třeba zaměňovat bezkomutátorové a bezkomutátorové motory.
Bezkomutátorový stroj je točivý elektrický stroj, ve kterém jsou všechna elektrická spojení vinutí zapojených do hlavního procesu přeměny energie prováděna bez posuvných elektrických kontaktů [1].
Asynchronní motor
Nejběžnější elektromotor v průmyslu. Výhody elektromotoru jsou: jednoduchost konstrukce, spolehlivost, nízká cena, dlouhá životnost, vysoký rozběhový moment a přetížitelnost. Nevýhodou asynchronního elektromotoru je obtížná regulace rychlosti otáčení.
Synchronní elektromotor
Synchronní motory se obvykle používají v aplikacích, kde je vyžadováno přesné řízení rychlosti otáčení nebo kde je vyžadována maximální hodnota parametrů, jako je výkon/výtlak, účinnost atd.
- S polním vinutím
- S permanentními magnety
- Reaktivní
- Hystereze
- Reaktivní hystereze
- Stepper
Speciální elektromotory
Servomotor
Servomotory nejsou samostatnou třídou motorů. Jako servomotor lze použít stejnosměrné a střídavé elektromotory se snímačem polohy rotoru. Servomotor se používá jako součást servo mechanismu pro přesné ovládání úhlové polohy, rychlosti a zrychlení pohonu. K provozu vyžaduje servomotor poměrně složitý řídicí systém, který je obvykle navržen přímo pro servopohon.
Základní parametry elektromotoru
- Točivý moment motoru
- Výkon elektromotoru
- Koeficient výkonu
- Jmenovitá rychlost
- Moment setrvačnosti rotoru
- Jmenovité napětí
- Elektrická časová konstanta
- Mechanické vlastnosti
Točivý moment motoru
Točivý moment (synonyma: kroutící moment, kroutící moment, moment síly) je vektorová fyzikální veličina rovna součinu poloměru vektoru taženého od osy otáčení k místu působení síly a vektoru této síly.
- kde M je točivý moment, Nm,
- F – síla, N,
- r – vektor poloměru, m
FAQ: Jmenovitý točivý moment Mnom, Nm, určeno vzorcem
- kde Pnom – jmenovitý výkon motoru, W,
- nnom — jmenovité otáčky, min -1 [4]
Počáteční rozběhový moment je moment elektromotoru při rozběhu.
FAQ: V anglickém systému měr je síla měřena v uncové síle (oz, ozf, unce-force) nebo librové síle (lb, lbf, pound-force)
1 unce = 1/16 lb = 0,2780139 N (N)
1 lb = 4,448222 N (N)točivý moment se měří v uncích na palec (oz∙in) nebo v librách na palec (lb∙in)
1 oz∙in = 0,007062 Nm (Nm)
1 lb∙in = 0,112985 Nm (Nm)Výkon elektromotoru
Výkon motoru je užitečný mechanický výkon na hřídeli motoru.
Mechanická síla
Výkon je fyzikální veličina, která ukazuje, kolik práce vykoná mechanismus za jednotku času.
- kde P je výkon, W,
- A – práce, J,
- t-čas, s
Práce je skalární fyzikální veličina rovna součinu průmětu síly do směru F a dráhy s, kterou urazí místo působení síly [2].
- kde s – vzdálenost, m
Pro rotační pohyb
- kde je úhel, rad,
- kde je úhlová rychlost, rad/s,
Tímto způsobem můžete vypočítat hodnotu mechanického výkonu na hřídeli rotačního elektromotoru
FAQ: Jmenovitá hodnota je výrobcem stanovená hodnota parametru elektrického výrobku (přístroje), se kterou má pracovat, což je výchozí hodnota pro výpočet odchylek.
Účinnost elektromotoru
Účinnost elektromotoru je charakteristická pro účinnost stroje při přeměně elektrické energie na mechanickou energii.
- kde je účinnost elektromotoru,
- P1 — dodávaný výkon (elektrický), W,
- P2 — užitečný výkon (mechanický), W
- V tomto případě, ztráty v elektromotorech kvůli:
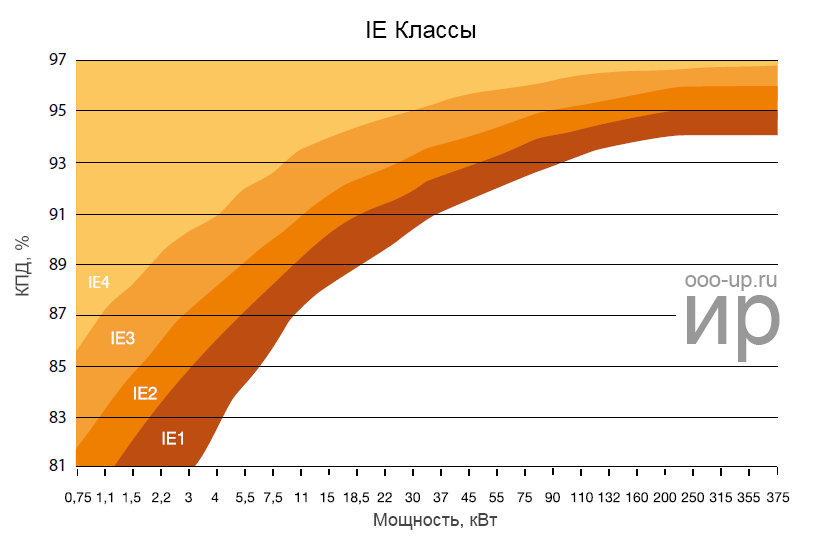
Účinnost elektromotoru se může lišit od 10 do 99 % v závislosti na typu a konstrukci.
Mezinárodní elektrotechnická komise definuje požadavky na účinnost elektromotorů. Podle normy IEC 60034-31:2010 jsou pro synchronní a asynchronní motory definovány čtyři třídy účinnosti: IE1, IE2, IE3 a IE4.
Frekvence otáčení
- kde n je rychlost otáčení elektromotoru, ot./min
Moment setrvačnosti rotoru
Moment setrvačnosti je skalární fyzikální veličina, která je mírou setrvačnosti tělesa v rotačním pohybu kolem osy, která se rovná součtu součinů hmotností hmotných bodů druhých mocnin jejich vzdáleností od osy.
- kde J je moment setrvačnosti, kg∙m 2,
- m – hmotnost, kg
FAQ: V anglickém systému měření se moment setrvačnosti měří v palcích unce-síla (oz∙in∙s 2)
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (kg∙m 2)
Moment setrvačnosti souvisí s momentem síly následujícím vztahem
- kde je úhlové zrychlení, s -2 [2]
FAQ: Stanovení momentu setrvačnosti rotující části elektromotoru je popsáno v GOST 11828-86
Jmenovité napětí
Jmenovité napětí je napětí, pro které je síť nebo zařízení navrženo a ke kterému se vztahují jejich provozní vlastnosti [3].
Elektrická časová konstanta
Elektrická časová konstanta je čas, počítaný od okamžiku přivedení stejnosměrného napětí na elektromotor, během kterého proud dosáhne úrovně 63,21 % (1-1/e) své konečné hodnoty.
- kde je časová konstanta, s
Mechanické vlastnosti
Mechanická charakteristika motoru je graficky vyjádřená závislost otáček hřídele na elektromagnetickém momentu při konstantním napájecím napětí.
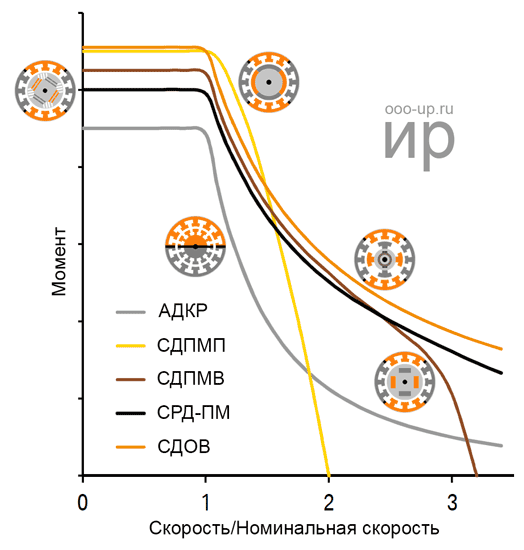
Porovnání charakteristik externě komutovaných elektromotorů
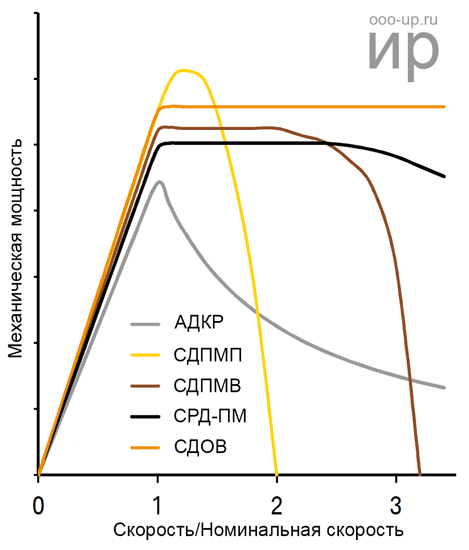
Níže jsou uvedeny srovnávací charakteristiky externě komutovaných elektromotorů z pohledu aplikace jako trakční motory ve vozidlech.
Porovnání mechanických charakteristik elektromotorů různých typů s omezeným statorovým proudem
Závislost výkonu na rychlosti otáčení hřídele pro různé typy motorů s omezeným statorovým proudem
Zařízení, která přeměňují elektrickou energii na mechanickou, se nazývají elektromotory (elektromotory). Zařízení, které působí obráceně, se nazývá „elektrický generátor“ tyto dva pojmy jsou zcela odlišné a neměly by být zaměňovány.
Princip činnosti elektromotoru
Proces přeměny elektrické energie na energii mechanickou zajišťuje elektromagnet. Mechanická síla působící na elektrické částice v poli elektromagnetu má tendenci narušovat vektor a polohu v prostoru. Rovina, ve které dochází k pohybu, je umístěna pod úhlem 90 % vzhledem k siločarám elektromagnetu. Když elektrický náboj protéká kovovými prvky, má mechanická síla tendenci měnit polohu každého proudového vodiče, včetně vinutí, pohybujícího se podle gimletova pravidla.
Často je podstata činnosti elektromotoru vysvětlena na obdélníkovém rámu umístěném mezi dvěma magnety (nebo ve tvaru U) pro větší názornost.
Elektromotory jsou ve svém jádru hřídelové mechanismy rotačního pohybu. Jejich konstrukce zahrnuje stator (vždy statický) a rotor (dynamický). Rotor se otáčí po přivedení proudu do vinutí motoru. V některých případech typy pohybů prováděných podpěrami, tiskárnami, kovoobráběcími stroji atd. vyžadují použití lineárních motorů pro usnadnění návrhu mechanismu.
Klasifikace rozděluje motory na motory pracující na stejnosměrný a střídavý proud.Motory v této skupině lze rozdělit na asynchronní, synchronní a krokové. Charakteristickým rysem této skupiny je způsob, jakým proud prochází cívkami se střídavým nábojem. V tomto případě je napájení dodáváno ze zdrojů příslušného typu.
Jádrem mechanismu (magnetické jádro) je stator sestávající ze speciálního ocelového plechu. V takových listech jsou drážky speciálně vyrobené pro navíjení. Použité vinutí zahrnuje jednotlivé prvky (rámy, cívky). Rotující rotor je umístěn na ložiskách ve středu statoru.
Drážky nejjednodušší cívky vinutí jsou umístěny na protilehlých stěnách statoru. Náboj s libovolnou polaritou může být nasměrován do fáze z jiného zdroje. Přivedení napětí na vodič obklopující stator ve směru znázorněném na obr. 1a demonstruje vzhled elektromagnetického pole (Ns a Ss). Rotor se tedy otáčí ve směru hodinových ručiček, aby synchronizoval rozdílné póly rotoru a statoru. Pokud má náboj směřující ke statoru jinou polaritu (obr. 1b), změní póly statoru svou polaritu a rotor se bude pohybovat opačným směrem.Na statoru je umístěno několik přídavných vinutí, která zajišťují konstantní pohyb rotoru. Energie do takových vinutí je dodávána ze samostatných zdrojů. Obrázek 2 ukazuje průřez takového třífázového motoru. Počet použitých cívek odpovídá počtu fází. Fáze jsou nejjednodušší rámy vyrobené z vodiče (obr. 2c), posunuté v pouzdře o 120 stupňů. vůči sobě navzájem. Na tomto obrázku proud protéká výhradně fázemi s tečkami a křížky. Pokud nasměrujete proud do fáze A, vektor magnetické osy se přesune do vodorovné polohy.
Směr elektromagnetických os statoru a rotoru se bude nadále měnit o 60 stupňů s každým novým přepnutím fáze. Pokud se po postupném přepínání proudu ve fázích prodlouží tok energie, v poslední fázi se rotor dostane do statického stavu. Takto funguje krokový motor. Výhodou je měřená rotace hřídele, tzn. v daném úhlu (nachází se v hodinkách, tiskárnách). Ale oblíbenější motory jsou asynchronní. Nejběžnější asynchronní elektromotory jsou zase třífázové. Nejčastěji se nacházejí v malých a velkých průmyslových podnicích, které se zabývají sériovou výrobou produktů nebo se zabývají těžebním průmyslem. V každodenním životě lze tento typ motoru nalézt v pračkách, ledničkách atd.
Tento typ motoru má stator podobný jako u synchronního motoru. Rozdíl mezi asynchronním a synchronním spočívá v dynamické části – rotoru. V tomto případě se rotor skládá z elektrooceli. Drážky obsahují tyčky, mohou být hliníkové nebo měděné, které jsou na koncích uzavřeny kroužky. Změnou frekvence napětí, které jde do statoru, můžete změnit rychlost točivého momentu hřídele. Elektromotory s hliníkovými součástmi váží a stojí méně než jednotky využívající měď.DC motory
Tento typ motoru je pojmenován podle stejnojmenného zdroje energie. Princip činnosti takového motoru spočívá v použití permanentních magnetů, které vytvářejí pole statoru. Rotor, který je někdy spojen s kotvou, nese vinutí. Rotor je pevně spojen s hřídelí, což mu dodává krouticí moment. Pokud se na vinutí horní a spodní části kotvy přivede napětí, které se pohybuje k sobě, dojde k vzájemnému vytlačení vodičů. Veškerá síla bude přenášena na měděný drát, který je uložen v drážkách kotvy, což způsobuje její otáčení. Aby nedošlo k brzdění, je nutné změnit směr pohybu náboje ve vinutí na opačný. V tom pomáhá kolektor, který spojuje vinutí s elektrickým obvodem motoru. V tomto případě vinutí kotvy plní funkci přenosu točivého momentu na hřídel, což způsobuje pohyb mechanismů zařízení.
Motor je spouštěn elektrickým obvodem, který se dodává v několika typech, v závislosti na zapojení. Všechna schémata jsou rozdělena na funkční, instalační, schematická atd., která jsou vzájemně propojena s funkčními vlastnostmi motoru.Dále
Další karta pro zveřejňování informací o článcích, doručení nebo jiném důležitém obsahu. Pomůže vám odpovědět na otázky kupujícího a rozptýlit jeho pochybnosti o nákupu. Použijte jej podle vlastního uvážení. Můžete jej odebrat nebo vrátit zpět změnou jednoho zaškrtávacího políčka v nastavení součásti. Velmi pohodlně.


















 Na statoru je umístěno několik přídavných vinutí, která zajišťují konstantní pohyb rotoru. Energie do takových vinutí je dodávána ze samostatných zdrojů. Obrázek 2 ukazuje průřez takového třífázového motoru. Počet použitých cívek odpovídá počtu fází.
Na statoru je umístěno několik přídavných vinutí, která zajišťují konstantní pohyb rotoru. Energie do takových vinutí je dodávána ze samostatných zdrojů. Obrázek 2 ukazuje průřez takového třífázového motoru. Počet použitých cívek odpovídá počtu fází.  Fáze jsou nejjednodušší rámy vyrobené z vodiče (obr. 2c), posunuté v pouzdře o 120 stupňů. vůči sobě navzájem. Na tomto obrázku proud protéká výhradně fázemi s tečkami a křížky. Pokud nasměrujete proud do fáze A, vektor magnetické osy se přesune do vodorovné polohy.
Fáze jsou nejjednodušší rámy vyrobené z vodiče (obr. 2c), posunuté v pouzdře o 120 stupňů. vůči sobě navzájem. Na tomto obrázku proud protéká výhradně fázemi s tečkami a křížky. Pokud nasměrujete proud do fáze A, vektor magnetické osy se přesune do vodorovné polohy. 




